About Registering the Map
Registration is the process of making a map's coordinate system correspond to the Cartesian coordinate system used by AutoCAD Map 3D.
You select specific calibration and control points for each map that you digitize.
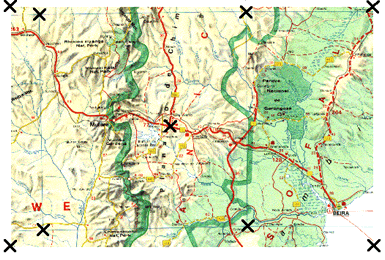
The crosses in this illustration mark the digitizer calibration points.
Choosing the Number of Calibration Points
Selecting a maximum of nine points is a good rule; specifying more only increases computation time with little increase in precision. If the original is not badly distorted, four corner points and some intermediate points are sufficient. It is more important to distribute the points evenly around the whole map than to concentrate more points in an area.
Calibration Options
To complete the calibration, select one of the following transformation options:
- Orthogonal — Needs only two digitized and specified calibration points to create a transformation consisting of arbitrary translation, uniform scaling, and rotation. This method is not recommended unless only two control points can be found.
- Affine — Requires three calibration points. Allows a tablet transformation combining translation, independent X and Y scaling, rotation, and some skewing. Provides an arbitrary linear transformation in two-dimensional space. This is the preferred method for registering paper maps drawn in a Cartesian coordinate system.
- Projective — Needs at least four calibration points. Makes a transformation equivalent to a perspective projection of any plane onto another plane. Allows for some stretching of an original paper drawing by different amounts along a perspective projection. This is the best option for orthophotos.
The TABLET command calculates the errors associated with the available transformation options, depending on how many points you digitized. When the calculations are complete, or when you cancel the calculations, a table showing the results of your calibration appears.
There are four possible responses from the calibration calculations for each transformation type:
- Exact — Number of points specified is correct for this type of transformation.
- Success — More points specified than needed. For a Success, the RMS error and standard deviation are reported.
- Impossible — Not enough points specified to define a transformation.
- Failure — Points specified are colinear or coincidental. The transformation may not have a valid definition.
If you get either Impossible or Failure, do not use that transformation. If all the results are Impossible or Failure, check the calibration on the digitizer, recalibrate, and digitize the map again.
RMS error, Standard Deviation, and Residual Values
The RMS error indicates how uniform or extreme the required transformation is: the lower the value, the better the calibration.
Standard deviation is reported at all calibration points. The residual error is the difference between the actual calibration point and the computed transformation point. A large difference indicates a procedural error. You may have entered the wrong coordinates or digitized a wrong point.
If the RMS and standard deviation values seem high, you might have made an error when entering location values or the map might have slipped during calibration. In this case, restart the procedure to calibrate the digitizer.
posted by Feature and Technology @ June 07, 2019
0 Comments
![]()

0 Comments:
Post a Comment
Subscribe to Post Comments [Atom]
<< Home